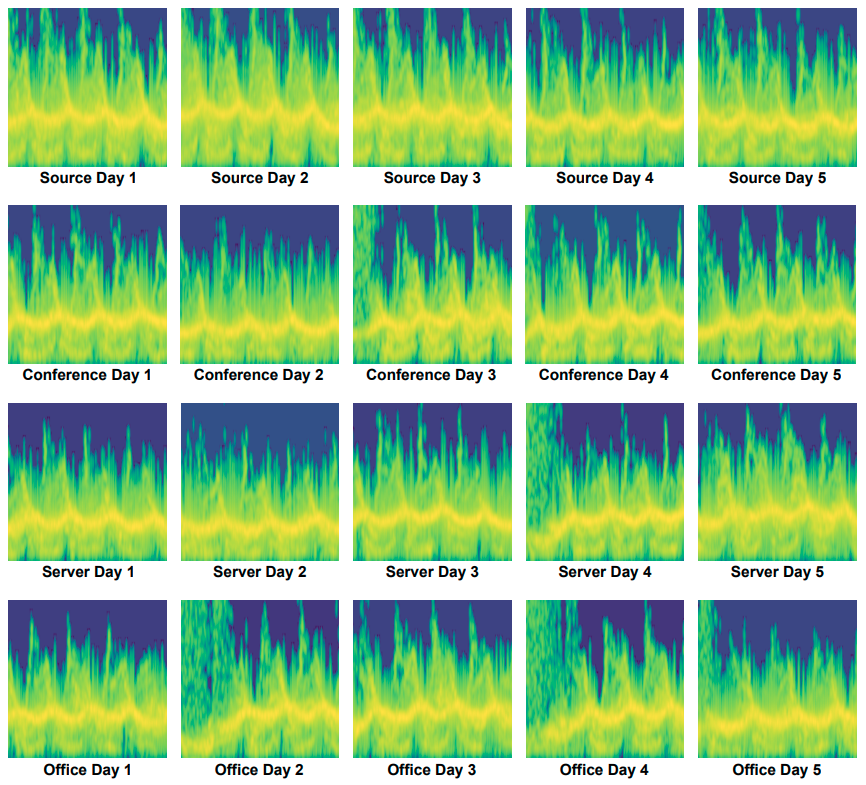
We curate a non-synthetic dataset consisting of mmWave radar-based gait biometric data. This dataset allows one to study and improve the spatio-temporal generalization performance of a radar-based biometric identification system
We collected gait data from 10 volunteers between the
ages of 18-35. Each subject’s data was collected in four
different locations. The source location was a research space
with cubicles, and the other three areas consisted of a server,
conference, and an office room. By maintaining four distinct
locations, we introduce SDS. In the source location, data was
collected on 10 different days for each subject. 5 separate days
of data was acquired for each of the three other locations,
which are used as target domains. A participant can either
walk towards the radar or walk away from the radar, each of
which is counted as one walking instance and generates one
spectrogram data sample. The data collection was limited to
100 data samples per person in the source location and 50 data
samples per person in each of the target locations on any given
day
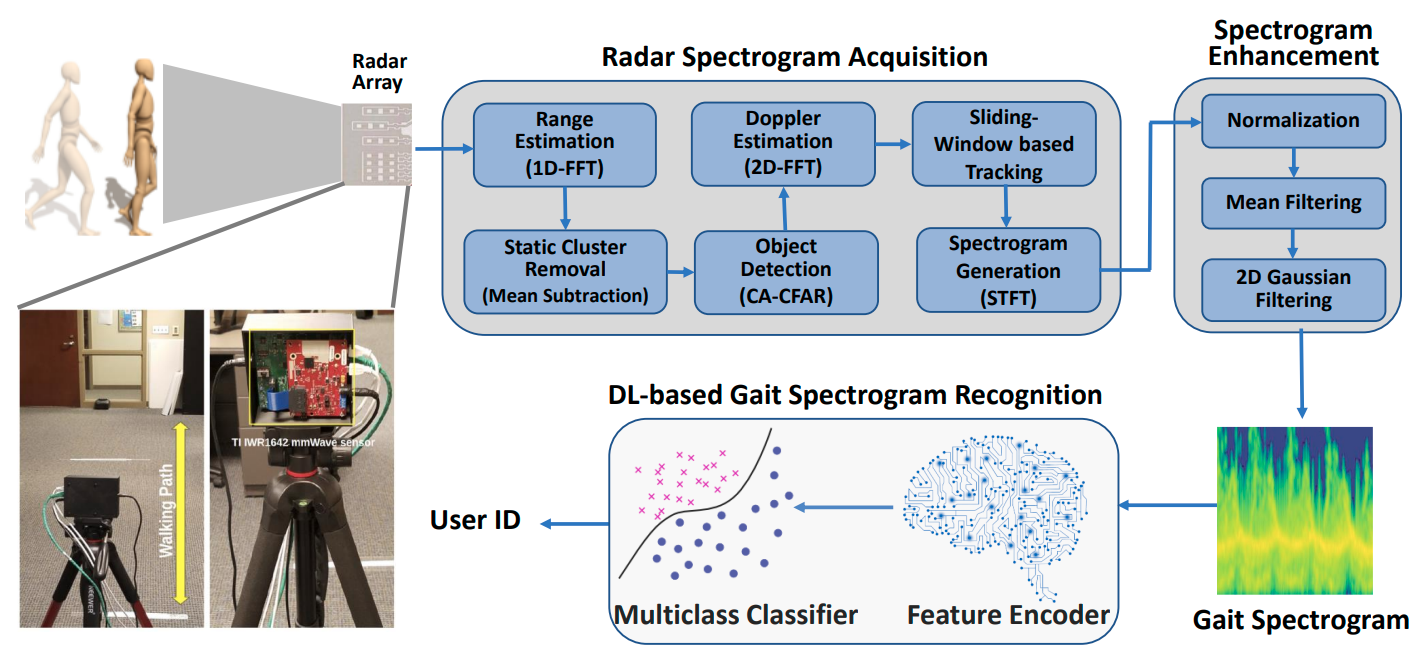
Texas Instruments (TI) IWR1642EVM boost board interfaced with a DCA1000EVM board to collect
the raw mmWave radar signal. The radar system consists of two transmitting antennas, four
receiving antennas, and 120° view of the azimuth plane. The radar system supports up to a 4Ghz
bandwidth operating on 77 GHz to 81 GHz. To configure FMCW wave parameters such as chirp
width, repetition time, and chirp slope from our radar device, we use a Dell Latitude 7480 laptop
with TI mmWave studio software as a control system.